Динамическия платформа (гексапод)
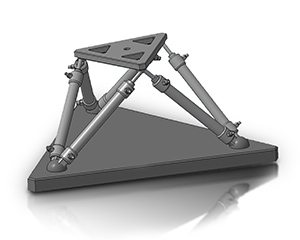
Платформа Гью-Стюарта — разновидность параллельного манипулятора, в которой используется октаэдральная компоновка стоек. Платформа имеет шесть степеней свободы (три поступательных и три вращательных, как абсолютно твердое тело).
Механизм платформы имеет шесть независимых ног на шарнирных соединениях. Длины ног можно изменять и тем самым изменяется ориентация платформы. Для определения положения и ориентации платформы в пространстве требуется решение кинематической системы уравнений.
Платформа Гью-Стюарта применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах.
Технические характеристики динамических платформ (гексаподов) нашего исполнения
| Характеристика | Величина |
|---|---|
| Грузоподъемность | до 300 кг |
| Линейные перемещения | до 0.5 м |
| Линейная скорость | до 100 мм/с |
| Мах. углы вращения (наклона) | до 70 град |
| Мах. угловая скорость | до 10 град/с |
| Точность позиционирования | до 0.01 мм |
| Тип привода | электромотор, пневматика, гидравлика |
| Интерфейс управления | USB, Ethernet, RS485, RS232 |
*Динамическая платформа в специальном исполнении может иметь более широкий диапазон характеристик.
Примеры реализованных динамических платформ
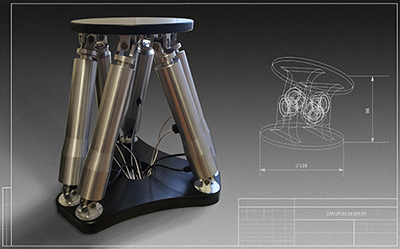
Основные технические характеристики:
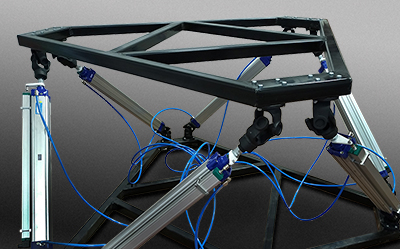
Основные технические характеристики:
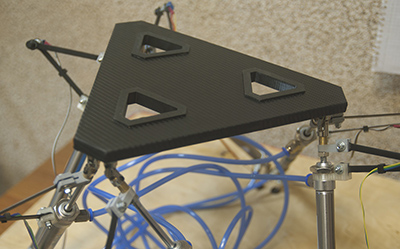
Основные технические характеристики: